 关注公众号
关注公众号 浏览手机版
浏览手机版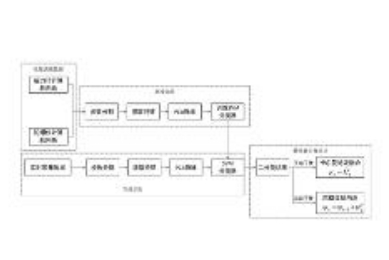
| 本发明公开了一种基于机器学习分类的融合航向角估计方法及系统,方法按如下步骤:步骤1:通过测量获得的三轴磁感应强度和三轴加速度信息计算航向角;步骤2:通过测量获得的三轴角速度信息计算航向角;步骤3:对步骤1获得的三轴磁感应强度数据是否受到磁场干扰进行分类;步骤4:根据步骤3的分类结果,在无磁场干扰的场景下,将步骤1和步骤2获得的航向角进行卡尔曼滤波融合计算最终的航向角;在有磁场干扰的场景下,仅利用步骤2获得的航向角来估计最终的航向角。本发明既避免了陀螺仪的累积误差,又避免使用了受到强磁场干扰的磁力计的数据,从而使得本发明提出的航向角估计结果更加鲁棒,精度也更高。 | |




电话:0421-2575228
邮箱:cylcjxj@126.com
地址:辽宁省朝阳市龙城区长江路六段五号
网址:www.lckc.cn
关注公众号浏览手机版