平台首页
-- 选择主栏目 --
产学研联盟“揭榜挂帅”
离岸创新中心
成果转化交易
科技金融服务
政策支持兑现
闲置资产交易
区间战略合作
智能制造
会员登录
免费注册
帮助中心
关于我们
优质企业
顾问咨询
0421-2575228
快速查找:
技术转让
闲置资产
成果发布
揭榜发榜
产业联盟
搜索
关注公众号
浏览手机版
成果转化交易
首页
企业需求
专利成果展示
科技成果展示
专家库
科技资讯
平台首页
>
成果转化交易
>
专利成果展示
一种智能汽车紧急工况下避撞轨迹规划方法
行业领域
安全防护
需求类别
技术需求
法律状态
已下证
项目描述
本发明公开了一种智能汽车紧急工况下避撞轨迹规划方法
发布时间
2024-01-19
收藏
联系客服
客服时间:早8:00~晚12:00
详情介绍
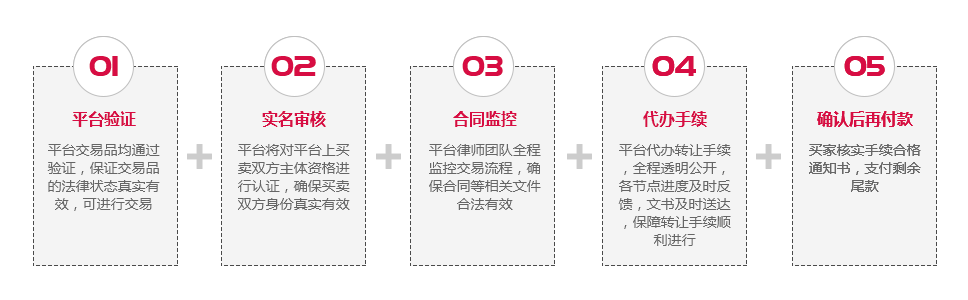
交易流程
安全保障
详情介绍
本发明公开了一种智能汽车紧急工况下避撞轨迹规划方法,以变道时间t、侧向加速度a
y
、转向角速度
三项性能指标构造目标函数,同时,基于稳定性约束、避撞空间约束、转向执行机构约束、边值约束构建规划约束条件从而得到最优轨迹,本发明基于最优控制理论,综合了非线性车辆动力学模型、稳定域信息和环境信息,并考虑车辆转向执行机构的饱和限制,最终能够得到满足优化目标的安全、稳定的避撞轨迹。
交易流程
安全保障
上一篇 >
一种网络滤波器多环境对比模拟检测系统
下一篇 >
一种瓦片自动贴纸设备
热点资讯
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
奖励处同省创研中心成果转化服务部开展工作会商
2022-03-29
朝阳·龙城科创网
www.lckc.cn
热门服务
专利申请
专利交易
专利增值服务
商标注册
关于我们
平台介绍
商务合作
联系方式
法律声明
帮助中心
新手教程
常见问题
服务协议
战略合作伙伴
辽宁省 · 朝阳市政府
朝阳龙城区政府管理委员会
咨询服务热线
周一至周六:08:30-21:30
电话:0421-2575228
邮箱:cylcjxj@126.com
地址:辽宁省朝阳市龙城区长江路六段五号
网址:www.lckc.cn
关注公众号
浏览手机版
友情连接
辽宁省 · 朝阳市人民政府
朝阳龙城区政府管理委员会
COPYRIGHT © 2022 www.lckc.cn - 朝阳·龙城科创网 版权所有
辽ICP备:100005668
 关注公众号
关注公众号 浏览手机版
浏览手机版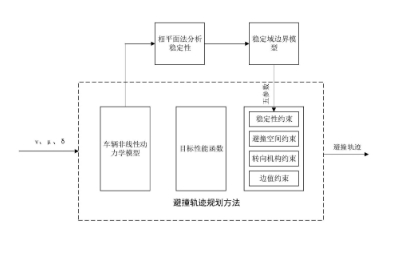



 关注公众号浏览手机版
关注公众号浏览手机版