详情介绍
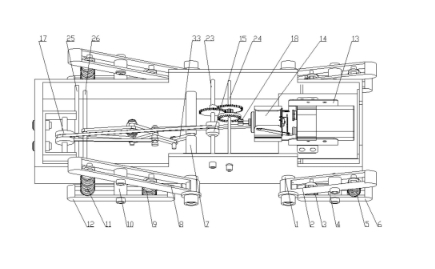
本发明公开了仿生跳跃机器人。现有跳跃机器人的动力源件数量较多,有效动力密度低,且重量较大,跳跃高度和距离较小。本发明包括机架、前腿跳跃机构、后腿跳跃机构和传动机构。前腿跳跃机构包括前腿轴、前腿动力杆、前腿小弹簧、前腿连接杆、前腿大弹簧和前腿脚掌杆。后腿跳跃机构包括后腿轴、后腿动力杆、后腿小弹簧、后腿连接杆、后腿大弹簧和后腿脚掌杆。传动机构包括电机、拉卷轮、弹簧、齿轮组、第二从动轴、第一从动轴、动力杆组和钢索。齿轮组包括三个缺齿齿轮和三个全齿齿轮。本发明通过前腿跳跃机构与后腿跳跃机构协同运作,能够进行稳定持续的跳跃式前进。
交易流程
安全保障
 关注公众号
关注公众号 浏览手机版
浏览手机版