详情介绍
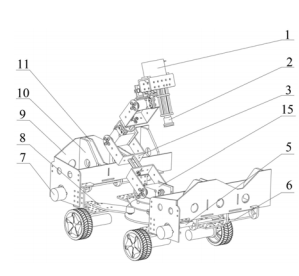
本发明公开了一种基于气动抓取的物流小
车及其运输方法。目前的物流机器人一般使用机
械手爪来夹取物件,容易伤害被夹取的物品。本
发明一种基于气动抓取的物流小车,包括车体、
动力装置、取料机械臂、物料存放装置、四个循迹
传感器、真空发生器和控制器。所述的动力装置
包括底盘、动力电机和车轮。四个车轮均支承在
底盘上,且由四个动力电机分别驱动。取料机械
臂包括第一舵机、第二舵机、第三舵机、第四舵
机、第五舵机、第六舵机、转盘、第一连接架、第二
连接架、第三连接架、第四连接架、吸盘架和真空
吸盘。物料存放装置包括料斗、定板、夹板和装夹
驱动组件。本发明中的物料存放装置能够在运输
中对不同尺寸的物品进行定位。
交易流程
安全保障
 关注公众号
关注公众号 浏览手机版
浏览手机版