详情介绍
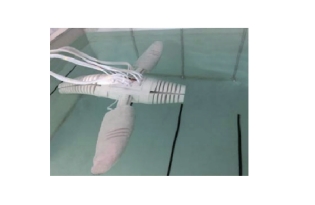
智能巡检机器人系统,提升复杂场景巡检机器人的智能化水平。主要功能:(1)采用改进的ORB-SLAM3算法,融合IMU的视觉惯性里程计,实现多栖巡检机器人的同时定位与地图构建。(2)提出基于情景记忆网络增量学习的机器人认知地图构建方法,提高机器人对物理环境变化的自适应性。(3)结合数字李生技术,多线程运行,便于模块化定制和修改,可移植性好。
巡检机器人远程工作站利用无线通信方式,通过控制软件完成与巡检机器人本地监控后台的信息交换,同时也可实现对巡检机器人的远程控制,在远程工作站的显示器上能直观地反映出巡检机器人采集的视频信息及其他数据信息。远程工作站功能类似于人类的大脑,除了机器人本身的动作控制指令由此发布外,机器人所有的视觉、音频等感知信息在此进行分辨。
交易流程
安全保障
 关注公众号
关注公众号 浏览手机版
浏览手机版